वायुमंडलीय पहचान विधियाँ
वायुमंडलीय जांच की मुख्य विधियाँ हैं: माइक्रोवेव रडार साउंडिंग विधि, हवाई या रॉकेट साउंडिंग विधि, साउंडिंग बैलून, उपग्रह रिमोट सेंसिंग और एलआईडीएआर। माइक्रोवेव रडार सूक्ष्म कणों का पता नहीं लगा सकता क्योंकि वायुमंडल में भेजी जाने वाली माइक्रोवेव मिलीमीटर या सेंटीमीटर तरंगें होती हैं, जिनकी तरंगदैर्ध्य लंबी होती है और वे सूक्ष्म कणों, विशेषकर विभिन्न अणुओं के साथ परस्पर क्रिया नहीं कर सकतीं।
हवाई और रॉकेट द्वारा ध्वनि सर्वेक्षण विधियाँ अधिक खर्चीली होती हैं और इनसे लंबे समय तक अवलोकन नहीं किया जा सकता। हालाँकि ध्वनि सर्वेक्षण गुब्बारों की लागत कम होती है, लेकिन वे हवा की गति से अधिक प्रभावित होते हैं। उपग्रह रिमोट सेंसिंग ऑन-बोर्ड रडार का उपयोग करके वैश्विक वायुमंडल का बड़े पैमाने पर पता लगा सकता है, लेकिन स्थानिक रिज़ॉल्यूशन अपेक्षाकृत कम होता है। लिडार का उपयोग वायुमंडल में लेजर किरण उत्सर्जित करके और वायुमंडलीय अणुओं या एरोसोल तथा लेजर के बीच परस्पर क्रिया (प्रकीर्णन और अवशोषण) का उपयोग करके वायुमंडलीय मापदंडों को प्राप्त करने के लिए किया जाता है।
लेजर की प्रबल दिशात्मकता, लघु तरंगदैर्ध्य (माइक्रोन तरंग) और संकीर्ण पल्स चौड़ाई तथा फोटोडिटेक्टर (फोटोमल्टीप्लायर ट्यूब, सिंगल फोटॉन डिटेक्टर) की उच्च संवेदनशीलता के कारण, लिडार वायुमंडलीय मापदंडों का उच्च परिशुद्धता और उच्च स्थानिक एवं लौकिक संकल्प के साथ पता लगा सकता है। अपनी उच्च परिशुद्धता, उच्च स्थानिक एवं लौकिक संकल्प तथा निरंतर निगरानी के कारण, लिडार वायुमंडलीय एरोसोल, बादलों, वायु प्रदूषकों, वायुमंडलीय तापमान और पवन गति का पता लगाने में तेजी से विकसित हो रहा है।
लिडार के प्रकार निम्नलिखित तालिका में दिखाए गए हैं:
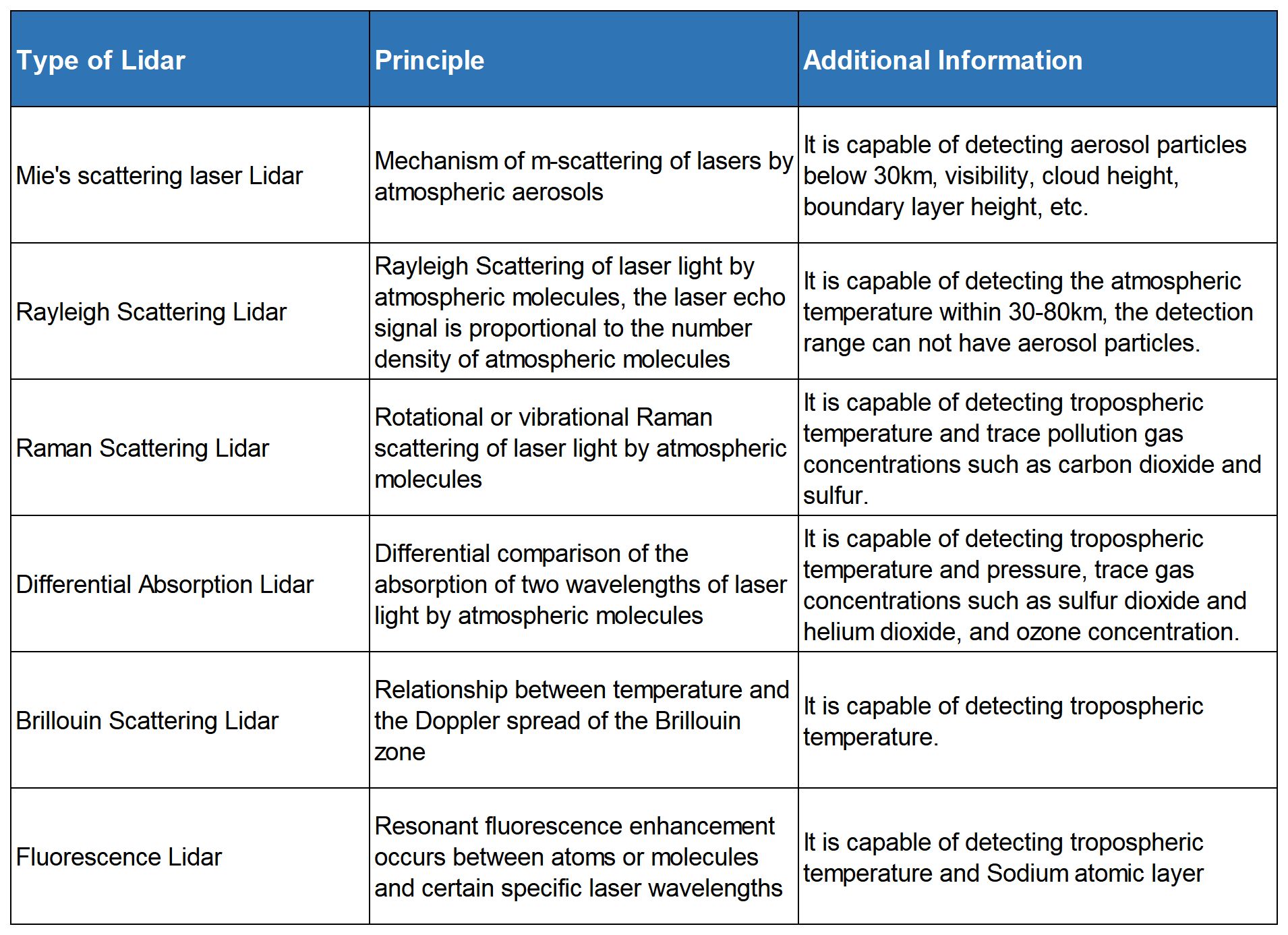
वायुमंडलीय पहचान विधियाँ
वायुमंडलीय जांच की मुख्य विधियाँ हैं: माइक्रोवेव रडार साउंडिंग विधि, हवाई या रॉकेट साउंडिंग विधि, साउंडिंग बैलून, उपग्रह रिमोट सेंसिंग और एलआईडीएआर। माइक्रोवेव रडार सूक्ष्म कणों का पता नहीं लगा सकता क्योंकि वायुमंडल में भेजी जाने वाली माइक्रोवेव मिलीमीटर या सेंटीमीटर तरंगें होती हैं, जिनकी तरंगदैर्ध्य लंबी होती है और वे सूक्ष्म कणों, विशेषकर विभिन्न अणुओं के साथ परस्पर क्रिया नहीं कर सकतीं।
हवाई और रॉकेट द्वारा ध्वनि सर्वेक्षण विधियाँ अधिक खर्चीली होती हैं और इनसे लंबे समय तक अवलोकन नहीं किया जा सकता। हालाँकि ध्वनि सर्वेक्षण गुब्बारों की लागत कम होती है, लेकिन वे हवा की गति से अधिक प्रभावित होते हैं। उपग्रह रिमोट सेंसिंग ऑन-बोर्ड रडार का उपयोग करके वैश्विक वायुमंडल का बड़े पैमाने पर पता लगा सकता है, लेकिन स्थानिक रिज़ॉल्यूशन अपेक्षाकृत कम होता है। लिडार का उपयोग वायुमंडल में लेजर किरण उत्सर्जित करके और वायुमंडलीय अणुओं या एरोसोल तथा लेजर के बीच परस्पर क्रिया (प्रकीर्णन और अवशोषण) का उपयोग करके वायुमंडलीय मापदंडों को प्राप्त करने के लिए किया जाता है।
लेजर की प्रबल दिशात्मकता, लघु तरंगदैर्ध्य (माइक्रोन तरंग) और संकीर्ण पल्स चौड़ाई तथा फोटोडिटेक्टर (फोटोमल्टीप्लायर ट्यूब, सिंगल फोटॉन डिटेक्टर) की उच्च संवेदनशीलता के कारण, लिडार वायुमंडलीय मापदंडों का उच्च परिशुद्धता और उच्च स्थानिक एवं लौकिक संकल्प के साथ पता लगा सकता है। अपनी उच्च परिशुद्धता, उच्च स्थानिक एवं लौकिक संकल्प तथा निरंतर निगरानी के कारण, लिडार वायुमंडलीय एरोसोल, बादलों, वायु प्रदूषकों, वायुमंडलीय तापमान और पवन गति का पता लगाने में तेजी से विकसित हो रहा है।
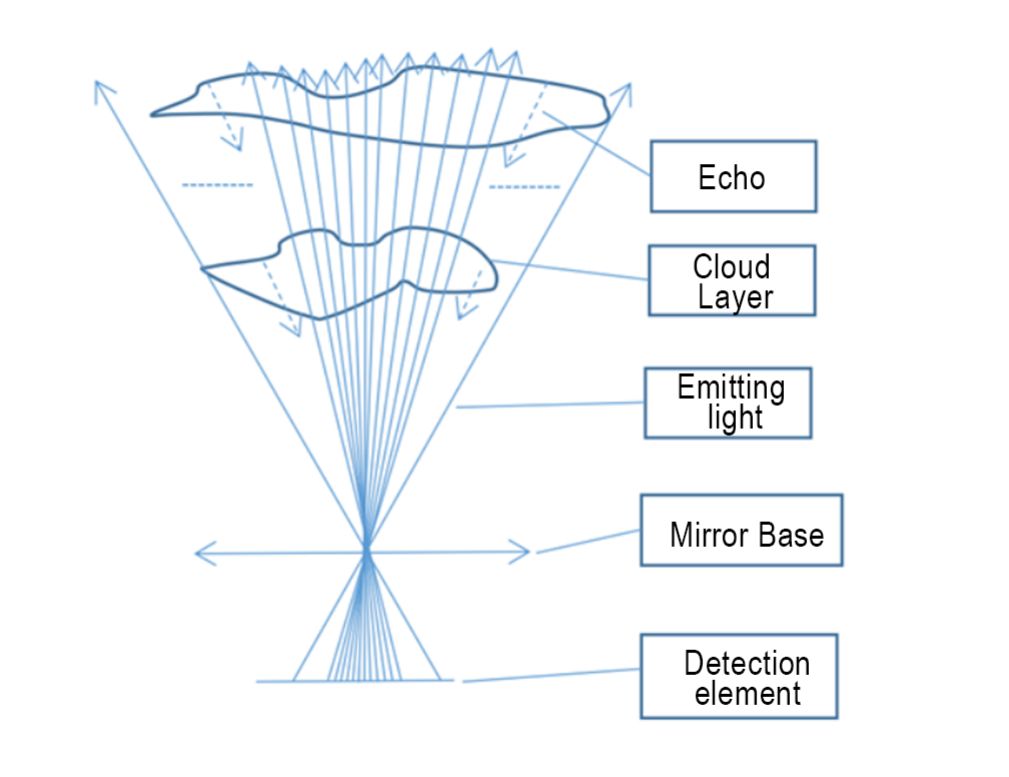
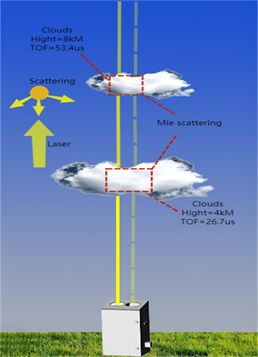
बादल मापन रडार के सिद्धांत का योजनाबद्ध आरेख
बादल की परत: हवा में तैरती हुई बादल की परत; उत्सर्जित प्रकाश: एक विशिष्ट तरंगदैर्ध्य की संरेखित किरण; प्रतिध्वनि: उत्सर्जन के बादल की परत से गुजरने के बाद उत्पन्न होने वाला प्रतिबिम्बित संकेत; दर्पण आधार: दूरबीन प्रणाली की समतुल्य सतह; संवेदन तत्व: कमजोर प्रतिध्वनि संकेत प्राप्त करने के लिए प्रयुक्त प्रकाशविद्युत उपकरण।
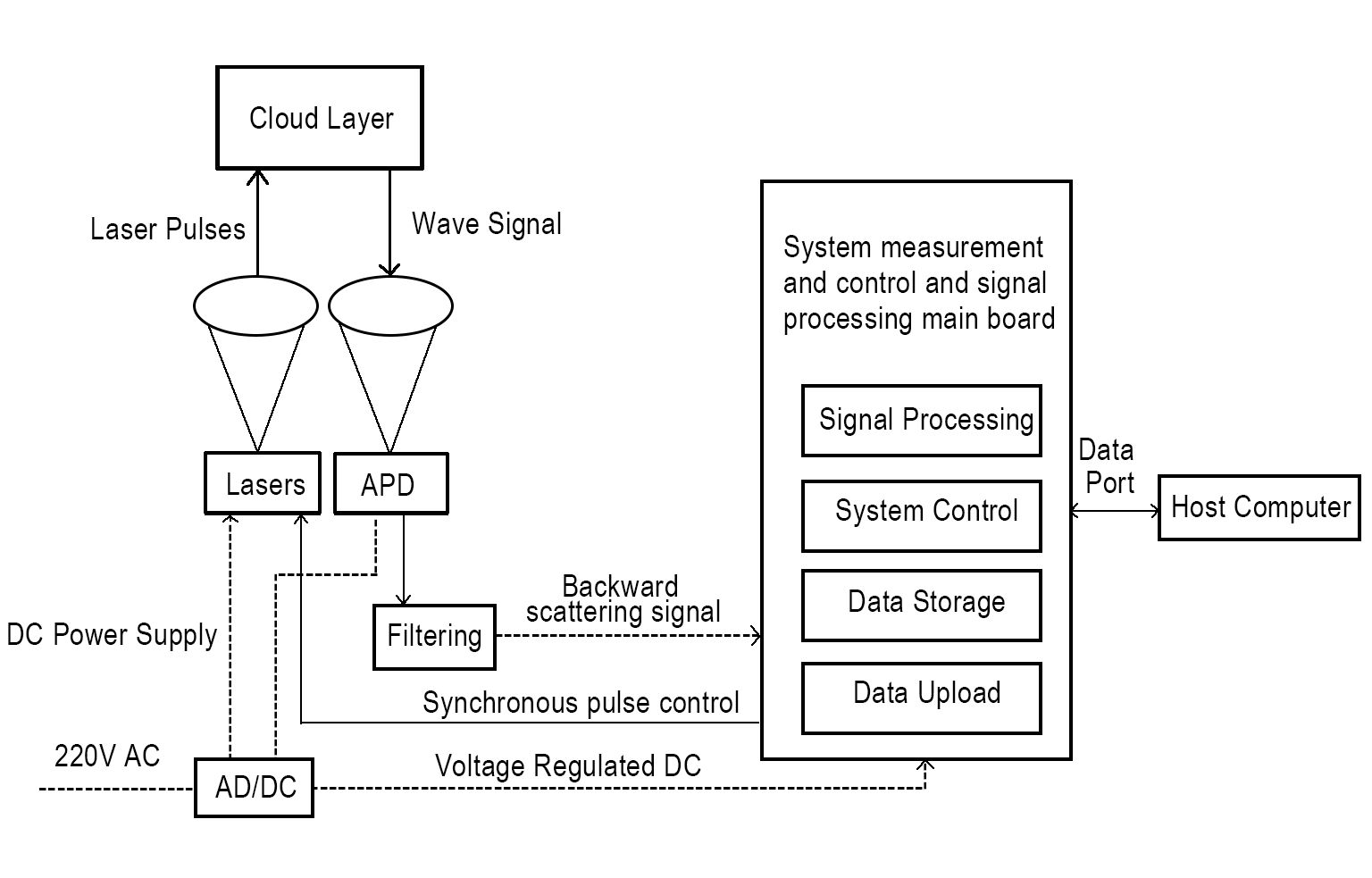
क्लाउड मापन रडार प्रणाली का कार्यप्रणाली ढांचा
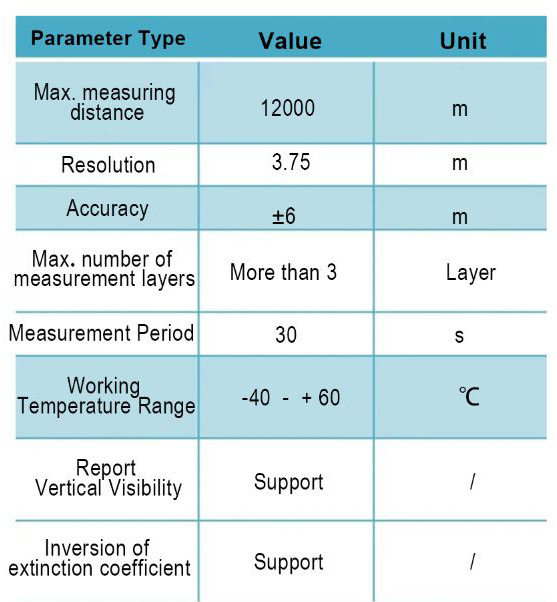
लुमिस्पॉट टेक के क्लाउड मापन लिडार के मुख्य तकनीकी पैरामीटर
उत्पाद की छवि

आवेदन

उत्पादों की कार्य स्थिति आरेख
पोस्ट करने का समय: 9 मई 2023